
1. 飞翼布局飞机横航向自稳定设计
飞翼布局飞机由于没有垂直安定面,造成其航向安定性明显小于常规布局飞机。目前工程上针对此问题的一般解决方法包括两类:1.基于自动控制系统的侧滑角反馈手段,比如B-2、X-47B;2.通过给飞机增加翼尖安定面,比如X-48B。本课题组在飞翼布局飞机设计研究中,提出了与前两种方法不同的第三种手段,即横航向自稳定设计。横航向自稳定设计以飞机横航向主要模态收敛特性为目标,对飞机展向截面上反角分布进行逆向设计,通过调节横航向稳定性导数数值,实现飞机在设计速度范围内不依赖于主动控制的横航向动稳定性。与此同时由于上反角调节不会影响飞机无侧滑时纵向气动力系数,因此横航向自稳定设计不会对飞机升阻性能产生明显影响。
目前该技术已在通过不同大小飞行平台的试验验证。在此过程中也发现了一些新的飞翼飞机气动、操稳问题,目前相关研究仍在持续推进中。


相关论文发表情况
[2] 宋磊,杨华,颜旭峰,黄俊.飞翼无增稳条件下横航向动稳定设计方法[J].系统工程与电子技术,2015,37(11):2561-2565.
[4] 宋磊. 飞翼布局飞机总体方案设计优化研究[D]北京航空航天大学, 2015
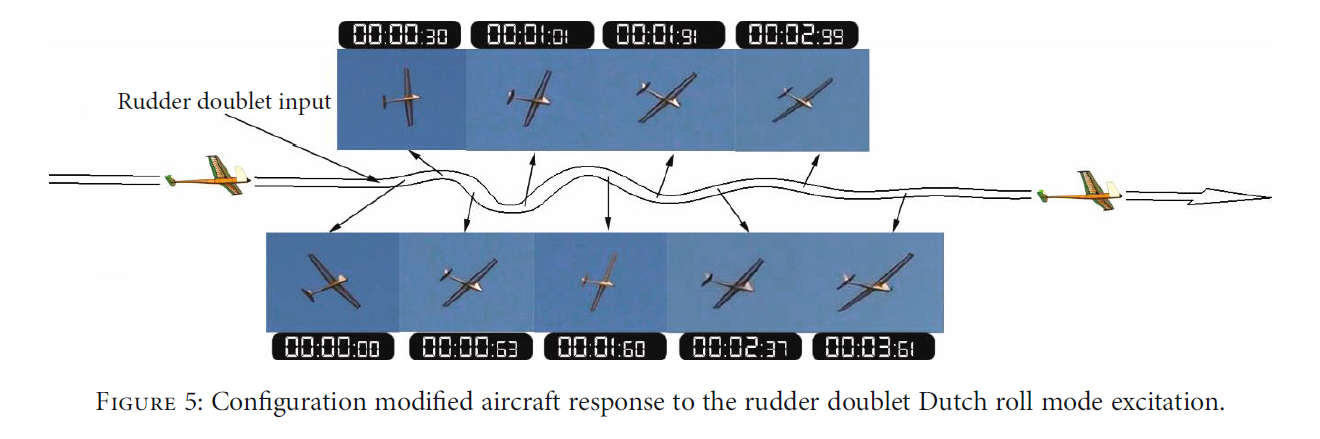
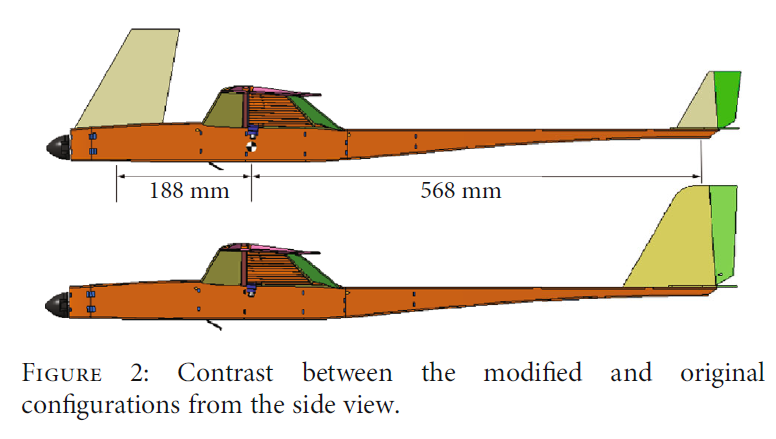
2. 有关飞机在无偏航静稳定性下实现荷兰滚模态收敛的飞行试验研究
通常认为偏航静稳定性是实现飞机荷兰滚模态收敛的必要条件。本研究一个设计了一组有意思的试验,用于验证没有航向静稳定性的情况下飞机也可以实现横航向荷兰滚模态的动稳定性。首先通过纯数学方法证明了没有偏航静稳定性依然可以实现荷兰滚模态收敛的可能性。其后选择了一个滑翔机航模作为研究对象,通过减小垂尾面积并在重心前添加垂直安定面的方法使飞机保持侧力稳定性Cy.beta不变的同时,将偏航静稳定性调整至零。在数值计算证明飞机可实现荷兰滚模态收敛的基础上,进行了实机飞行测试。试飞结果证明了理论分析的正确性,但同时也发现了改动后飞机操稳特性的一些新的变化。该结果表明,一方面在进行荷兰滚模态分析时仅强调偏航静稳定性的方法是不完善的,另一方面也证明偏航静稳定性对荷兰滚模态之外的其他操稳特性影响有待进一步研究。
相关论文发表情况
3. 缩比飞行试验与飞参测量
[2] 杨华, 宋磊, 王文剑, 等. 动力翼伞纵向四自由度动力学仿真[J]. 北京航空航天大学学报, 2014 (11): 1615-1622.
[3] 杨华, 宋磊, 黄俊. 冲压翼伞滑翔性能研究[J]. 飞行力学, 2014 (6): 510-513.
相关发明专利
| 申请号 | 公开(公告)号 | 申请人 | 发明名称 | 发明人 | 分类号 | 申请人所在国 |
| CN201210404846 | CN102944375A | 北京航空航天大学 | 一种适用于微小型飞行器的复合气动数据传感器 | 宋磊;黄俊;张扬;刘成;杨华;解静峰 | G01M9/06; | 中国 |
| CN201310023623 | CN103101621A | 北京航空航天大学 | 一种适用于柱形空间装载的翼伞飞行器 | 杨华;黄俊;宋磊;刘成;解静峰;颜旭峰 | B64D35/02; B64C31/036; | 中国 |
| CN201310271141 | CN103395498A | 北京航空航天大学 | 一种改善飞翼布局飞机横航向飞行品质的上反角优化方法 | 解静峰;黄俊;宋磊;杨华;颜旭峰;刘成 | B64F5/00; | 中国 |
| CN201710155734 | CN107016898A | 北京航空航天大学 | 一种增强人机交互体验的新型触屏模拟顶板装置 | 卫晨豪;黄俊;宋磊;付竟成 | G09B9/16; G09B9/22; | 中国 |
| CN201710362161 | CN107145677A | 北京航空航天大学 | 一种改进的几何参数翼型设计方法 | 陆孝强;黄俊;宋磊;解静峰;车秀美 | G06F17/50; | 中国 |
| CN201710657362 | CN107472511A | 北京航空航天大学 | 基于扰流板和后缘舵面配合的飞翼布局飞机的气动舵面 | 解静峰;宋磊;黄俊;付竟成;卫晨豪;陆孝强 | B64C9/12; B64C9/20; | 中国 |
| CN201710729638 | CN107554802A | 北京航空航天大学 | 一种适用于飞翼布局小型喷气式无人机的进气道 | 解静峰;宋磊;黄俊;付竟成;卫晨豪;陆孝强 | B64D33/02; | 中国 |
| CN201710866169 | CN107719647A | 北京航空航天大学 | 高可靠性无人机起落架收放系统 | 付竟成;黄俊;宋磊;郑浩 | B64C25/22; B64C25/26; | 中国 |
| CN201810601186 | CN108488266A | 北京航空航天大学 | 一种适用于微型无人飞行器机轮的碟片式刹车装置 | 卫晨豪;宋磊;黄俊;郑浩 | F16D55/46; F16D65/14; B64C25/42; | 中国 |
| CN201810989396 | CN109229346A | 北京航空航天大学 | 一种适用于微型无人飞行器油气减震式起落架的缓冲装置 | 卫晨豪;宋磊;黄俊;付竟成 | B64C25/58; | 中国 |
| CN201811489647 | CN109631188A | 北京航空航天大学 | 无耗材的室内荷电水雾旋风空气净化器 | 李凡星;宋磊;付竟成;林可;黄俊 | F24F3/16; F24F3/14; F24F13/20; | 中国 |
4. 飞机设计教学用飞行模拟器
团队共同开发完成沙河校区“飞行器数字化协同创新中心”飞机设计教学用飞行模拟器,包括一台运输机模拟器和两台战斗机模拟器。全部模拟器均采用MATLAB/Simlink驱动底层架构,完成气动、飞行动力学解算相关内容开发。视景软件基于当今流行的模拟飞行软件二次开发,实现了与Simulink的数据双向通信。仪表采用快速编程工具进行开发,以便于学生根据课程学习和科研需求自行进行修改。
硬件方面运输机模拟器视景采用多屏显示器方案以兼顾实现大视角与高分辨率显示需求,驾驶舱布局参考当今主流电传操纵系统客机,大部分面板采用触屏控制方案模拟各种开关效果,同时亦便于根据需求进行驾驶舱界面的快速修改。战斗机模拟器采用混合现实头盔以实现虚拟外景与模拟舱内实景的融合显示,驾驶舱布局参考基于大型触摸显示面板的当今主流4代机布局。两型模拟器均采用了可以进行编程的主动杆力控制系统,可以很方便地进行杆力编程,实现随速度的杆力梯度调整及自动推杆器、自动抖杆器等效果。
该模拟器目前已在位于沙河校区学生8公寓B119“新一代全数字化飞行器科教协同创新中心”中投入使用。




宣传视频: https://www.bilibili.com/video/BV1wv4y1c7Qx
