
概述
课题组致力于解决飞机从论证、设计、生产到使用、维护全生命周期中的工程科学问题。其中,工程问题的研究核心是紧密围绕飞机真实使用场景展开,确保所有研究成果具备落地可行性,能在近期或中期产生显著的工程效益。而对于科学问题,我们则以揭示现象本质、探究内在机理为出发点,通过构建相应的理论模型,形成具有广泛通用性的科学方法,从而有效指导飞机领域的实践应用。
1. 气动分析软件开发
VLM513软件是基于涡格法进行飞机气动和操稳分析的一套软件,基于Matlab完成开发,全部代码开源发布于此。主要开发工作在本人博士期间完成,目前保持不定期更新。本软件在开发的初期借鉴了Tomas Melin的Tornado,但经过多年的不断开发完善,目前代码90%以上与原始的Tornado不同。相对于Tornado改进主要包括:
① 提升了计算速度。通过改进数据结构提高了求解多个状态时的计算速度;
② 输入接口更加方便使用。可以通过文本文件定义和CATIA导入两种方式输入计算目标;
③ 数值稳定性提升。更改了计算某些靠近涡线点处下洗时的处理逻辑,使软件数值稳定性更高,另外对计算舵面偏转时的气动力方法也进行了修改,使得气动力从舵面中立到某一偏角过程中保持连续变化;
④ 提升了一些情况下的计算精度。将涡格布置在中弧面而不是弦平面,使得处理使用大弯度翼型时计算精度提升。求解时加入了涡格侧缘涡的分析,使得当飞机存在侧滑时气动力计算精度显著提高;
⑤ 增加了操稳分析功能。可以计算稳定性导数和操纵导数,并联合输入文件内的惯量信息进行纵向/横航向模态特性分析;
本软件可用于空气动力学课程学习以及飞行器方案设计和优化,软件主要界面为英文,为方便使用学习,代码中关键部分都有中文注释。任何算法都有其适用范围和局限性,使用者需要根据自己的知识对软件的计算结果正确性进行分析。开发者不对软件使用造成的任何影响承担责任。软件下载见“开源软件”。
学习提示:
涡格法是基于线化位势流方程求解的一种气动算法,因为位势流中不包含粘性,因此无法进行粘性造成所有影响的分析,比如摩擦阻力、流动的分离现象等等。由于诱导阻力是由下洗影响下的升力方向偏折产生,因此可以通过涡格法进行求解。VLM中零升阻力的求解来自于Raymer著作《Aircraft Design: A Conceptual Approach》中介绍的当量蒙皮法,是一种工程近似方法。
|
 |
 |
 |
求解精度验证算例(参照NASA TM 4640数据进行验证)



相关论文发表情况
[1] 宋磊, 杨华, 解静峰, 等. 基于改进涡格法的飞翼布局飞机稳定性导数计算[J]. 南京航空航天大学学报, 2014, 46(3): 457-462.
[2] 宋磊. 飞翼布局飞机 总体方案设计优化研究[D]. 北京: 北京航空航天大学, 2017.
——————————————————————————————————————————————————————
2. 飞机翼型的参数化表达方法
在飞机的设计过程中,气动优化是一项贯穿概念设计以及详细设计的任务,而翼型的参数化设计则是完成气动优化的基础,其一方面决定了设计优化搜索范围对真实设计空间的覆盖程度,另一方面还对优化问题在数学层面的非线性、连续性具有重要影响。用更少的参数尽可能更加准确地对翼型曲线进行数学表达是翼型参数化方法的一项重要目标。
课题组该项研究中提出了一种基于几何特征的翼型参数化方法(Improved Geometric Parameter Airfoil Parameterization Method,后文缩写为IGP),该方法通过对翼型弯度分布和厚度分布进行分别描述,仅通过8个变量实现了对翼型的参数化描述(与其他几种参数化方法对比见Table 2.1)。该种方法中使用的各项变量十分容易与空气动力学研究中的一般翼型描述方法建立联系,因此在使用过程中更容易由气动设计经验对翼型优化过程进行指导和分析。另外,由于本方法将翼型的弯度和厚度进行了解耦的描述,便于其在基于位势流理论(比如涡格法)进行气动求解优化的过程中进行使用。在此情况下,气动优化可仅针对弯度曲线进行,因为根据薄翼理论机翼小迎角下的升力特性主要由弯度决定。为了验证这一方法的正确性,课题组使用Profili数据库中的翼型进行了拟合,拟合精度相当不错,具体可参考本段后面链接的公开发表论文。
Table 2.1 Comparison of each method's number of parameters.


相关论文发表情况
1. 飞翼布局飞机横航向自稳定设计
飞翼布局飞机由于没有垂直安定面,造成其航向安定性明显小于常规布局飞机。目前工程上针对此问题的一般解决方法包括两类:1.基于自动控制系统的侧滑角反馈手段,比如B-2、X-47B;2.通过给飞机增加翼尖安定面,比如X-48B。本课题组在飞翼布局飞机设计研究中,提出了与前两种方法不同的第三种手段,即横航向自稳定设计。横航向自稳定设计以飞机横航向主要模态收敛特性为目标,对飞机展向截面上反角分布进行逆向设计,通过调节横航向稳定性导数数值,实现飞机在设计速度范围内不依赖于主动控制的横航向动稳定性。与此同时由于上反角调节不会影响飞机无侧滑时纵向气动力系数,因此横航向自稳定设计不会对飞机升阻性能产生明显影响。
目前该技术已在通过不同大小飞行平台的试验验证。在此过程中也发现了一些新的飞翼飞机气动、操稳问题,目前相关研究仍在持续推进中。


相关论文发表情况
[2] 宋磊,杨华,颜旭峰,黄俊.飞翼无增稳条件下横航向动稳定设计方法[J].系统工程与电子技术,2015,37(11):2561-2565.
[4] 宋磊. 飞翼布局飞机总体方案设计优化研究[D]北京航空航天大学, 2015
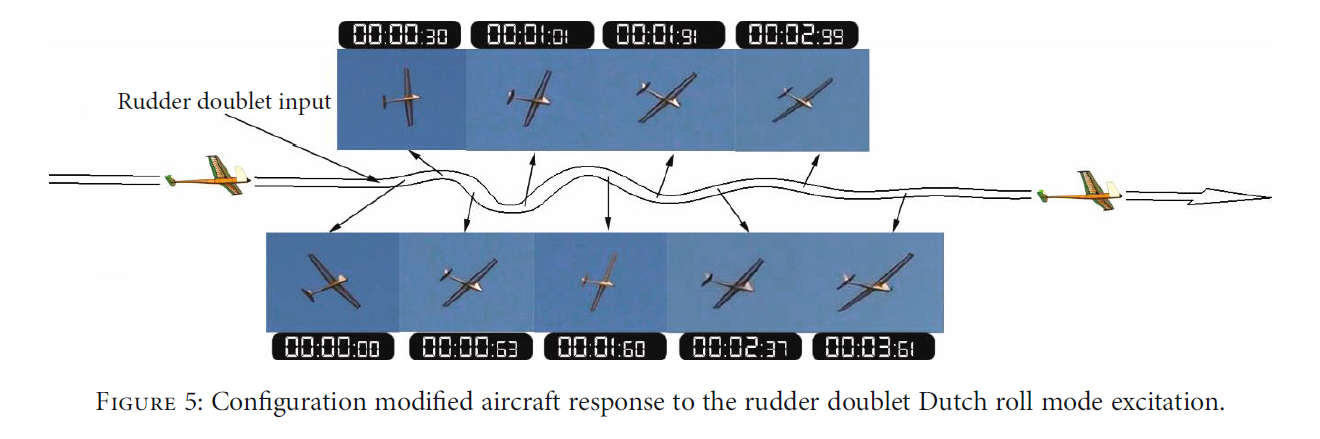
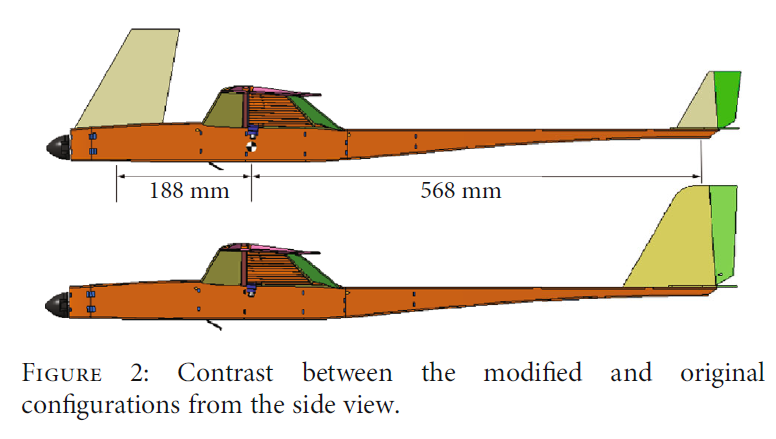
2. 有关飞机在无偏航静稳定性下实现荷兰滚模态收敛的飞行试验研究
通常认为偏航静稳定性是实现飞机荷兰滚模态收敛的必要条件。本研究一个设计了一组有意思的试验,用于验证没有航向静稳定性的情况下飞机也可以实现横航向荷兰滚模态的动稳定性。首先通过纯数学方法证明了没有偏航静稳定性依然可以实现荷兰滚模态收敛的可能性。其后选择了一个滑翔机航模作为研究对象,通过减小垂尾面积并在重心前添加垂直安定面的方法使飞机保持侧力稳定性Cy.beta不变的同时,将偏航静稳定性调整至零。在数值计算证明飞机可实现荷兰滚模态收敛的基础上,进行了实机飞行测试。试飞结果证明了理论分析的正确性,但同时也发现了改动后飞机操稳特性的一些新的变化。该结果表明,一方面在进行荷兰滚模态分析时仅强调偏航静稳定性的方法是不完善的,另一方面也证明偏航静稳定性对荷兰滚模态之外的其他操稳特性影响有待进一步研究。
相关论文发表情况
3. 缩比飞行试验与飞参测量
[2] 杨华, 宋磊, 王文剑, 等. 动力翼伞纵向四自由度动力学仿真[J]. 北京航空航天大学学报, 2014 (11): 1615-1622.
[3] 杨华, 宋磊, 黄俊. 冲压翼伞滑翔性能研究[J]. 飞行力学, 2014 (6): 510-513.
相关发明专利
| 申请号 | 公开(公告)号 | 申请人 | 发明名称 | 发明人 | 分类号 | 申请人所在国 |
| CN201210404846 | CN102944375A | 北京航空航天大学 | 一种适用于微小型飞行器的复合气动数据传感器 | 宋磊;黄俊;张扬;刘成;杨华;解静峰 | G01M9/06; | 中国 |
| CN201310023623 | CN103101621A | 北京航空航天大学 | 一种适用于柱形空间装载的翼伞飞行器 | 杨华;黄俊;宋磊;刘成;解静峰;颜旭峰 | B64D35/02; B64C31/036; | 中国 |
| CN201310271141 | CN103395498A | 北京航空航天大学 | 一种改善飞翼布局飞机横航向飞行品质的上反角优化方法 | 解静峰;黄俊;宋磊;杨华;颜旭峰;刘成 | B64F5/00; | 中国 |
| CN201710155734 | CN107016898A | 北京航空航天大学 | 一种增强人机交互体验的新型触屏模拟顶板装置 | 卫晨豪;黄俊;宋磊;付竟成 | G09B9/16; G09B9/22; | 中国 |
| CN201710362161 | CN107145677A | 北京航空航天大学 | 一种改进的几何参数翼型设计方法 | 陆孝强;黄俊;宋磊;解静峰;车秀美 | G06F17/50; | 中国 |
| CN201710657362 | CN107472511A | 北京航空航天大学 | 基于扰流板和后缘舵面配合的飞翼布局飞机的气动舵面 | 解静峰;宋磊;黄俊;付竟成;卫晨豪;陆孝强 | B64C9/12; B64C9/20; | 中国 |
| CN201710729638 | CN107554802A | 北京航空航天大学 | 一种适用于飞翼布局小型喷气式无人机的进气道 | 解静峰;宋磊;黄俊;付竟成;卫晨豪;陆孝强 | B64D33/02; | 中国 |
| CN201710866169 | CN107719647A | 北京航空航天大学 | 高可靠性无人机起落架收放系统 | 付竟成;黄俊;宋磊;郑浩 | B64C25/22; B64C25/26; | 中国 |
| CN201810601186 | CN108488266A | 北京航空航天大学 | 一种适用于微型无人飞行器机轮的碟片式刹车装置 | 卫晨豪;宋磊;黄俊;郑浩 | F16D55/46; F16D65/14; B64C25/42; | 中国 |
| CN201810989396 | CN109229346A | 北京航空航天大学 | 一种适用于微型无人飞行器油气减震式起落架的缓冲装置 | 卫晨豪;宋磊;黄俊;付竟成 | B64C25/58; | 中国 |
| CN201811489647 | CN109631188A | 北京航空航天大学 | 无耗材的室内荷电水雾旋风空气净化器 | 李凡星;宋磊;付竟成;林可;黄俊 | F24F3/16; F24F3/14; F24F13/20; | 中国 |
4. 飞机设计教学用飞行模拟器
团队共同开发完成沙河校区“飞行器数字化协同创新中心”飞机设计教学用飞行模拟器,包括一台运输机模拟器和两台战斗机模拟器。全部模拟器均采用MATLAB/Simlink驱动底层架构,完成气动、飞行动力学解算相关内容开发。视景软件基于当今流行的模拟飞行软件二次开发,实现了与Simulink的数据双向通信。仪表采用快速编程工具进行开发,以便于学生根据课程学习和科研需求自行进行修改。
硬件方面运输机模拟器视景采用多屏显示器方案以兼顾实现大视角与高分辨率显示需求,驾驶舱布局参考当今主流电传操纵系统客机,大部分面板采用触屏控制方案模拟各种开关效果,同时亦便于根据需求进行驾驶舱界面的快速修改。战斗机模拟器采用混合现实头盔以实现虚拟外景与模拟舱内实景的融合显示,驾驶舱布局参考基于大型触摸显示面板的当今主流4代机布局。两型模拟器均采用了可以进行编程的主动杆力控制系统,可以很方便地进行杆力编程,实现随速度的杆力梯度调整及自动推杆器、自动抖杆器等效果。
该模拟器目前已在位于沙河校区学生8公寓B119“新一代全数字化飞行器科教协同创新中心”中投入使用。




宣传视频: https://www.bilibili.com/video/BV1wv4y1c7Qx
相关论文发表情况

