English
手机版
登录
机器人服务与规划课题组
首页
团队信息
简介
负责人
成员
团队动态
新闻动态
通知公告
科研成果
研究方向
论文成果
图片
常用链接
关于我们
更多
科研成果
当前位置:
机器人服务与规划课题组
>>
科研成果
论文成果
Sipu Ruan,Jundong Mei.Gradient-parameterized deformable Minkowski sum with applications on contact detection:Multibody System Dynamics
查看详情
Yazhe Luo,Yifei Li.Hand-Eye Coordinated Grasping Method for Textured Targets in Unstructured Dynamic Scenes.[期刊]:Chinese Journal of Mechanical Engineering,2025,38(1):160
查看详情
Yazhe Luo,Yifei Li,Jiting Li.Instant Grasping Framework of Textured Objects Via Precise Point Matches and Normalized Target Poses.[期刊]:Journal of Mechanisms and Robotics,2025,17(8):081013
查看详情
图片
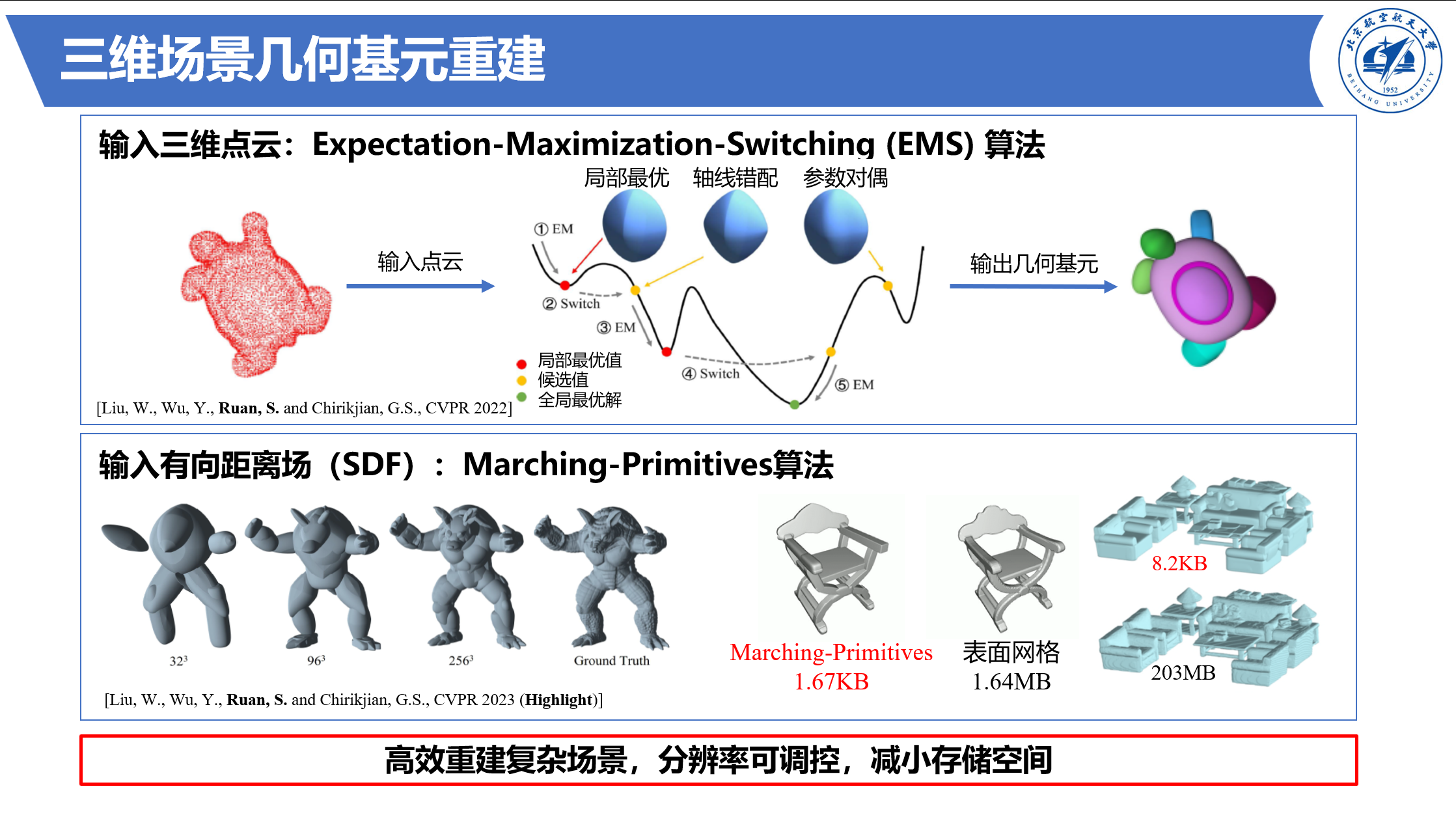
几何基元重建
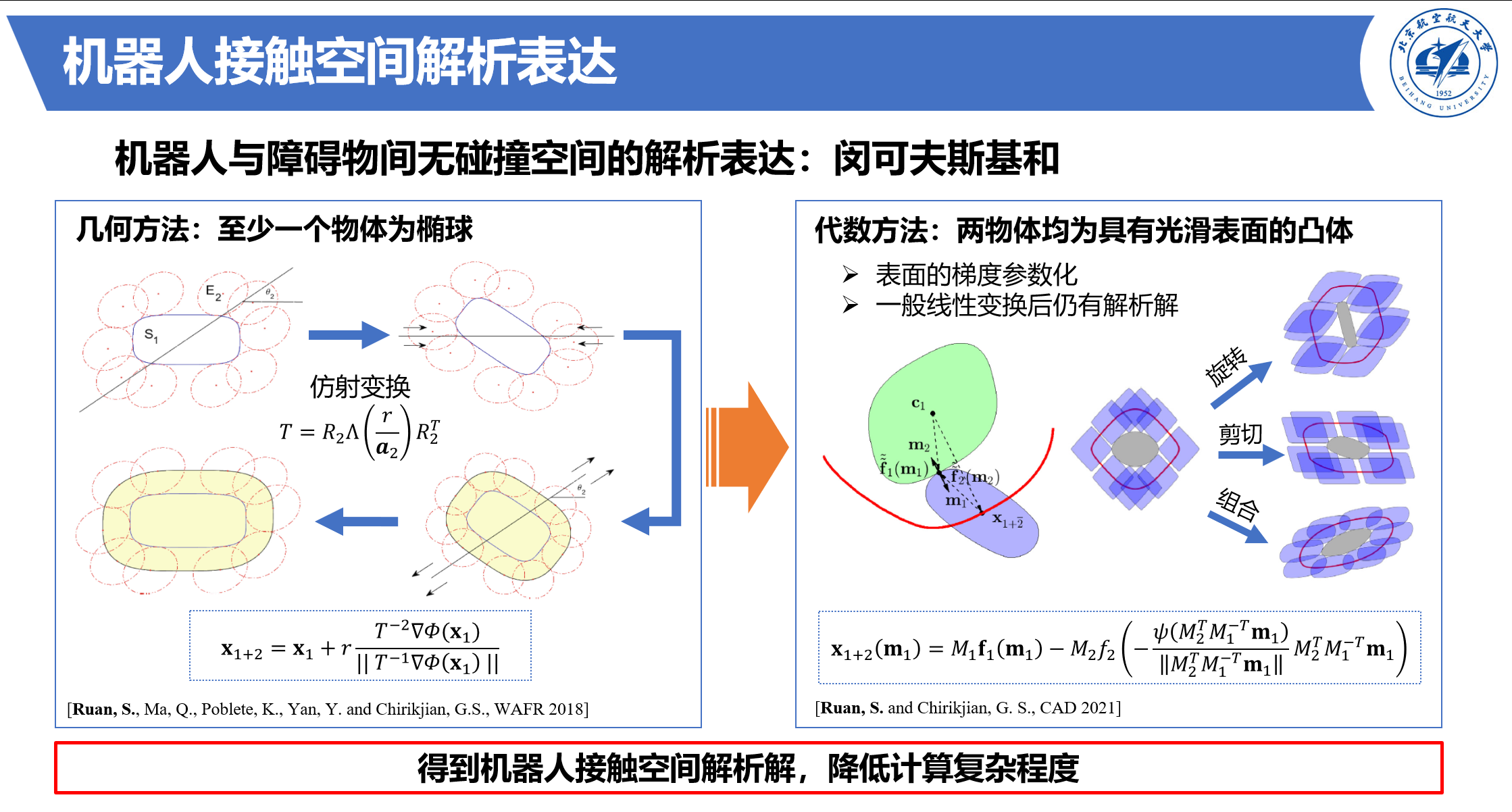
接触空间解析表达
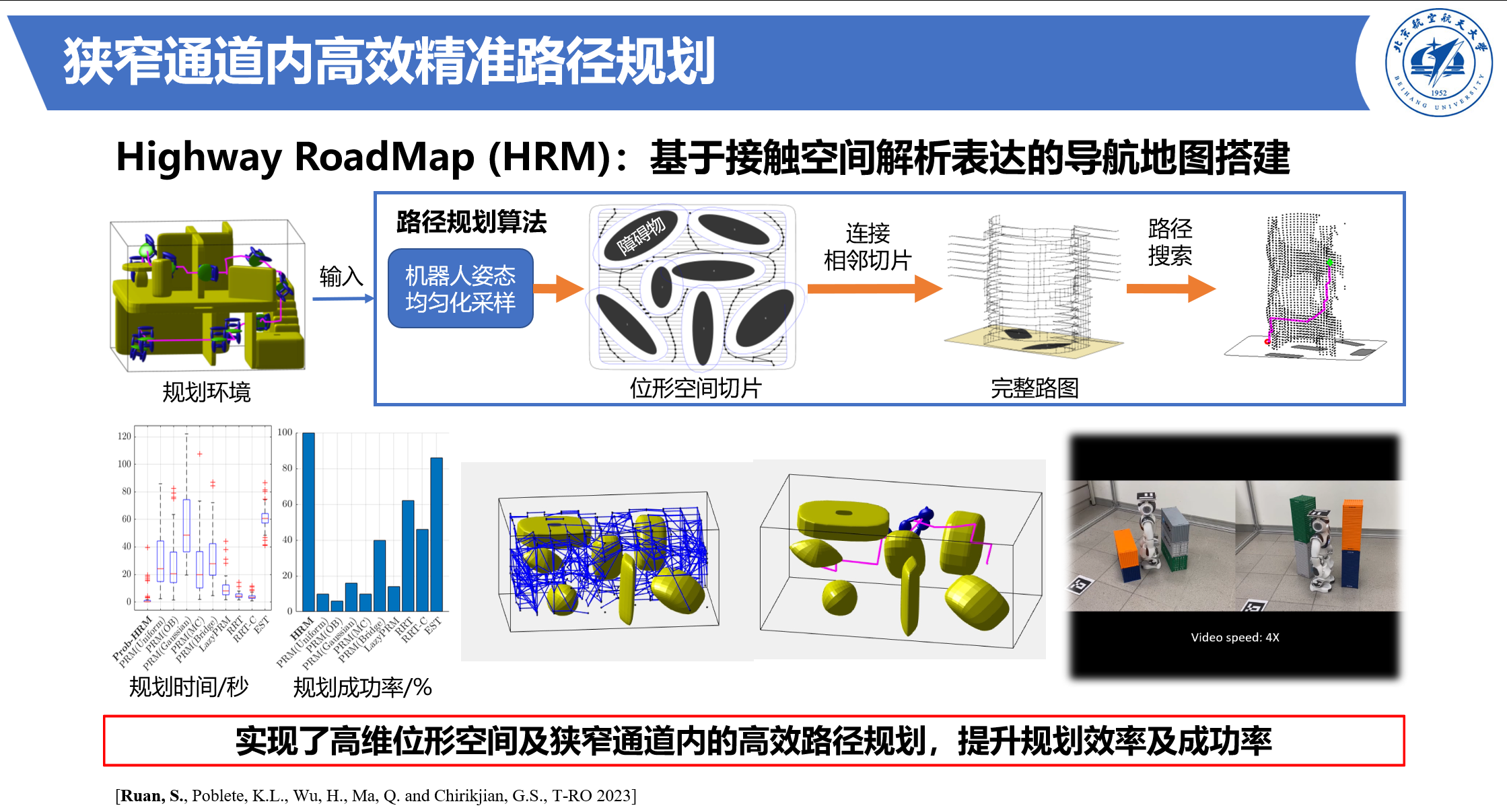
运动规划
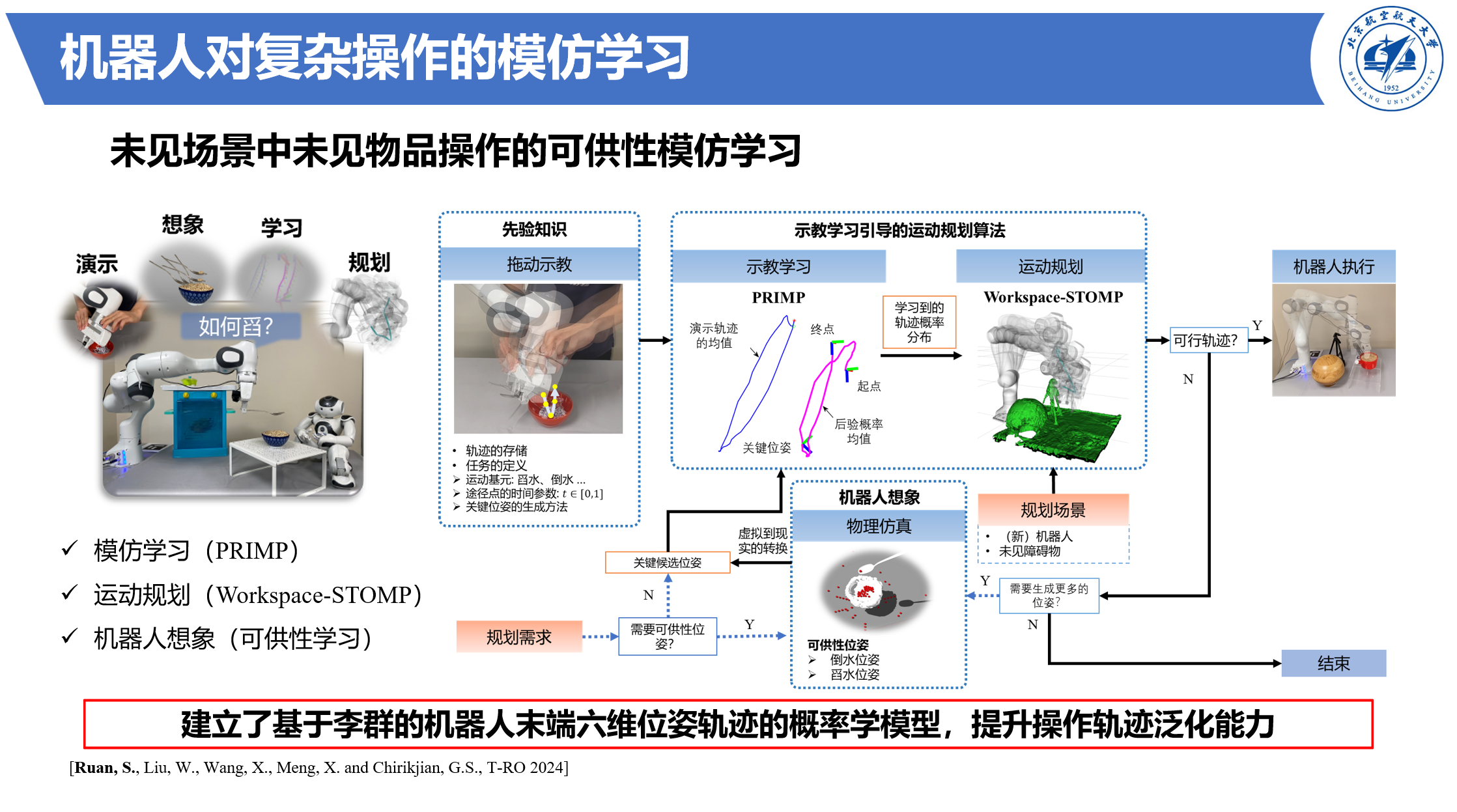
操作技能模仿学习
专利成果
暂无内容
著作成果
暂无内容
获奖信息
暂无内容