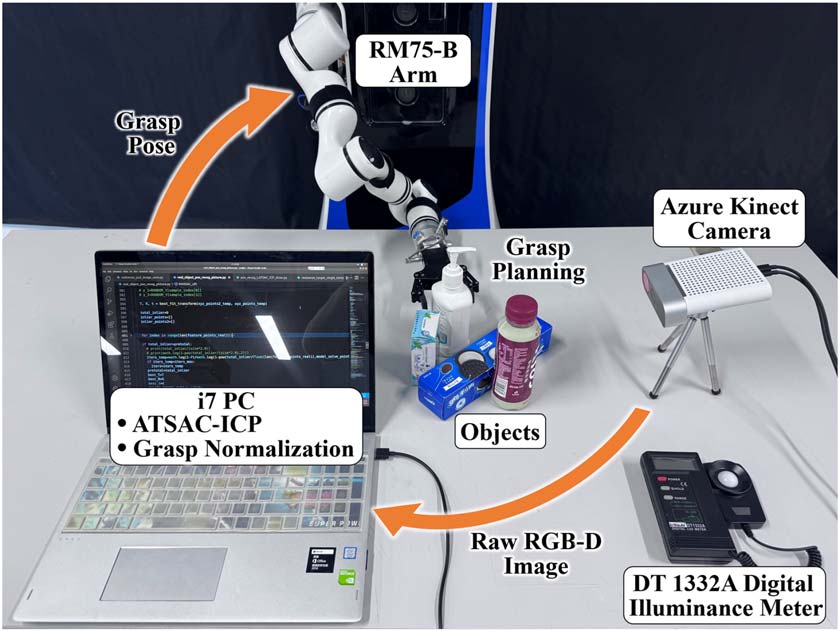
Instant Grasping Framework of Textured Objects Via Precise Point Matches and Normalized Target Poses
发布时间:2026-02-10
点击次数:
-
发表刊物:
Journal of Mechanisms and Robotics
-
关键字:
机器人抓取
-
合写作者:
Yifei Li,Jiting Li
-
第一作者:
Yazhe Luo
-
论文类型:
期刊论文
-
通讯作者:
Sipu Ruan,Diansheng Chen
-
文献类型:
期刊
-
卷号:
17
-
期号:
8
-
页面范围:
081013
-
是否译文:
否
-
发表时间:
2025-08-01
-
收录刊物:
SCI