English
手机版
登录
机器人服务与规划课题组
首页
团队信息
简介
负责人
成员
团队动态
新闻动态
通知公告
科研成果
研究方向
论文成果
图片
常用链接
关于我们
更多
论文成果
当前位置:
机器人服务与规划课题组
>>
科研成果
>>
论文成果
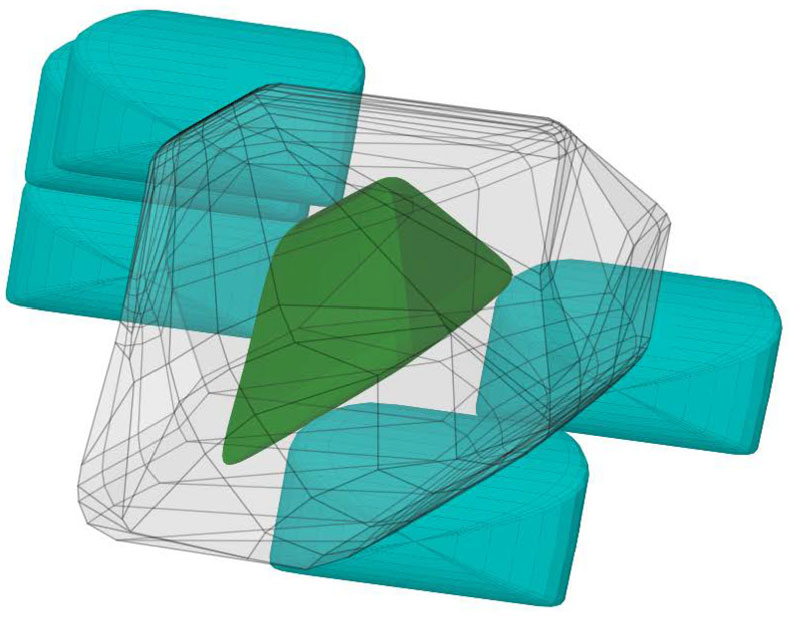
Gradient-parameterized deformable Minkowski sum with applications on contact detection
发布时间:2026-02-10
点击次数:
发表刊物:
Multibody System Dynamics
关键字:
碰撞检测;机器人路径规划;计算几何
合写作者:
Jundong Mei
第一作者:
Sipu Ruan
论文类型:
期刊论文
是否译文:
否
下一条:
Hand-Eye Coordinated Grasping Method for Textured Targets in Unstructured Dynamic Scenes