
“碰撞检测”是机器人算法中的核心之一,也是保证机器人安全运行的关键之一。如何准确且快速地得到两个物体间的接触状态和最短距离一直是该领域研究的热点问题。碰撞检测被广泛应用在物理仿真和机器人的运动规划等领域。例如,在规划机器人的运动路径时,往往需要充分地考虑机器人与周围环境和其自身组件间的碰撞问题,从而得到安全可行的最优路径。
CFC算法
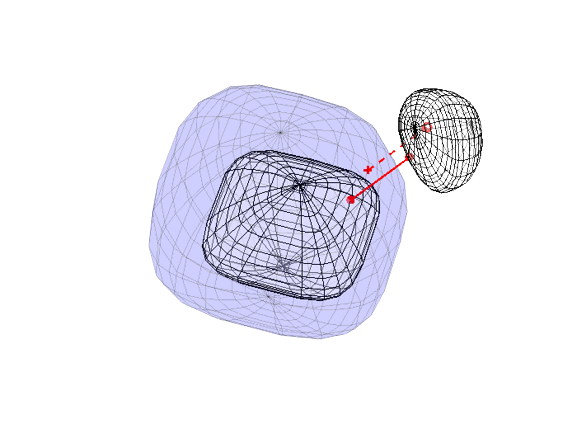
本项目的研究对象是两个具有平滑表面的凸体,研究涵盖了静态和连续这两类碰撞检测的问题。基于两物体碰撞空间的解析解,提出了解决此问题的CFC(Closed-Form Contact space)方法。该方法于2022年发表在了 IEEE Robotics and Automation Letters (RA-L) 期刊上。
GPD-CFC算法
面向具有非线性形变的物体(如梯形变换),提出了计算接触空间的GPDMink方法,并基于此提出了GPD-CFC算法,获取物体间接触状态、最近距离/渗透深度、最近点法线方向等信息。该方法于2025年发表在 Multibody Systems Dynamic期刊上。
【相关论文】
[1] Ruan, S.* and Mei, J.,2025. Gradient-parameterized deformable Minkowski sum with applications on contact detection. Multibody System Dynamics, 1-26.
https://link.springer.com/article/10.1007/s11044-025-10134-5
[2] Ruan, S., Wang, X. and Chirikjian, G.S., 2022. Collision Detection for Unions of Convex Bodies with Smooth Boundaries using Closed-form Contact Space Parameterization. IEEE Robotics and Automation Letters, 7(4), pp.9485-9492
https://ieeexplore.ieee.org/document/9829274
相较传统确定性碰撞检测,该项目旨在计算物体位姿不确定情况下发生碰撞的概率。由于无法得到解析解,算法通过近似,计算碰撞概率的上边界。进而,基于概率信息引导机器人在不确定性环境中进行避障。相关方法于2025年发表在 IEEE Robotics and Automation Letters (RA-L) 期刊上。
【相关论文】
[1] Wang, X., Ruan, S., Meng, X. and Chirikjian, G.S., 2025. Enhanced Probabilistic Collision Detection for Motion Planning Under Sensing Uncertainty. IEEE Robotics and Automation Letters, 10(10), pp.10910 - 10917
https://ieeexplore.ieee.org/document/11145942
微信公众号
