
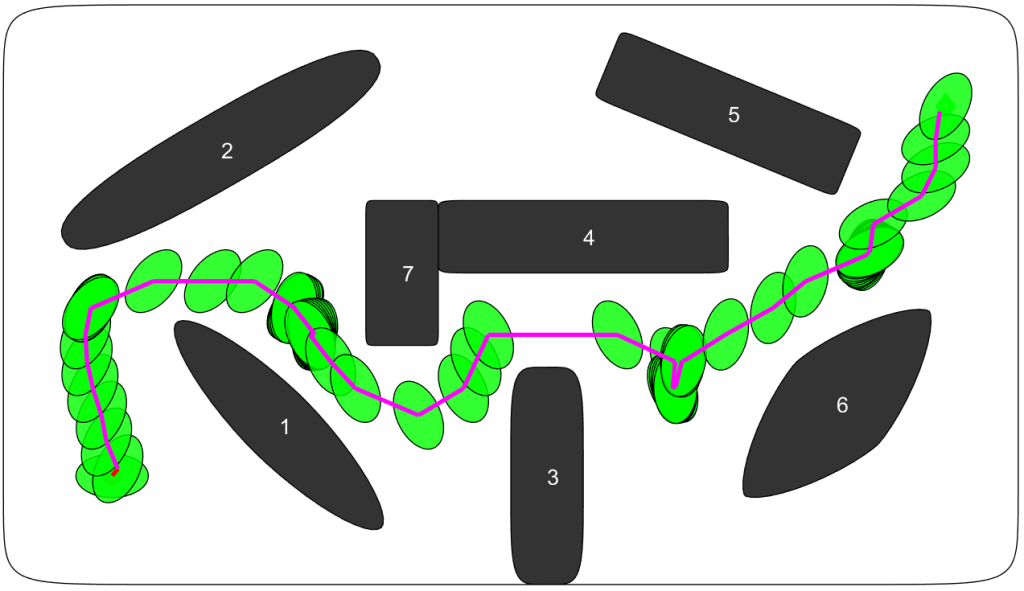
提出了“高速路图(Highway Roadmap, HRM)”的路径规划算法,主要运用几何方法解决了机器人路径规划中关键的“狭窄空间”和“高自由度”的问题。其核心基于无碰撞位形空间边界的参数化解析解。将机器人包络成椭球的集合,环境中的障碍物表示为具有光滑表面的严格凸体(例如超二次曲面)。通过计算完整的位形空间障碍物,构建分辨率可自适应调节的位形空间切片,为机器人了提供无碰撞环境的先验知识,在无碰撞区域内直接生成安全位形。研究了椭球的包络空间,使得机器人在有旋转的运动中也可以保证安全性,而无须进行额外的碰撞检测。进而,结合基于随机采样的路径规划算法,突破了高维问题中计算复杂度高的瓶颈,将所提的方法延伸到了多自由度的机器人上。
【相关论文】
[1] Ruan, S., Poblete, K.L., Wu, H., Ma, Q. and Chirikjian, G.S., 2022. Efficient Path Planning in Narrow Passages for Robots with Ellipsoidal Components. IEEE Transactions on Robotics
https://ieeexplore.ieee.org/document/9841604
[2] Ruan S., Ma Q., Poblete K.L., Yan Y., Chirikjian G.S., 2018. Path Planning for Ellipsoidal Robots and General Obstacles via Closed-form Minkowski Operations. In International Workshop on the Algorithmic Foundations of Robotics (pp. 3-18). Springer, Cham
微信公众号
