Affiliation of Participant(s):无人系统研究院
Teaching and Research Group:微型无人机实验室
Status:结题
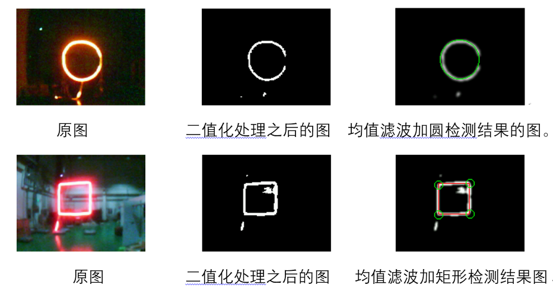
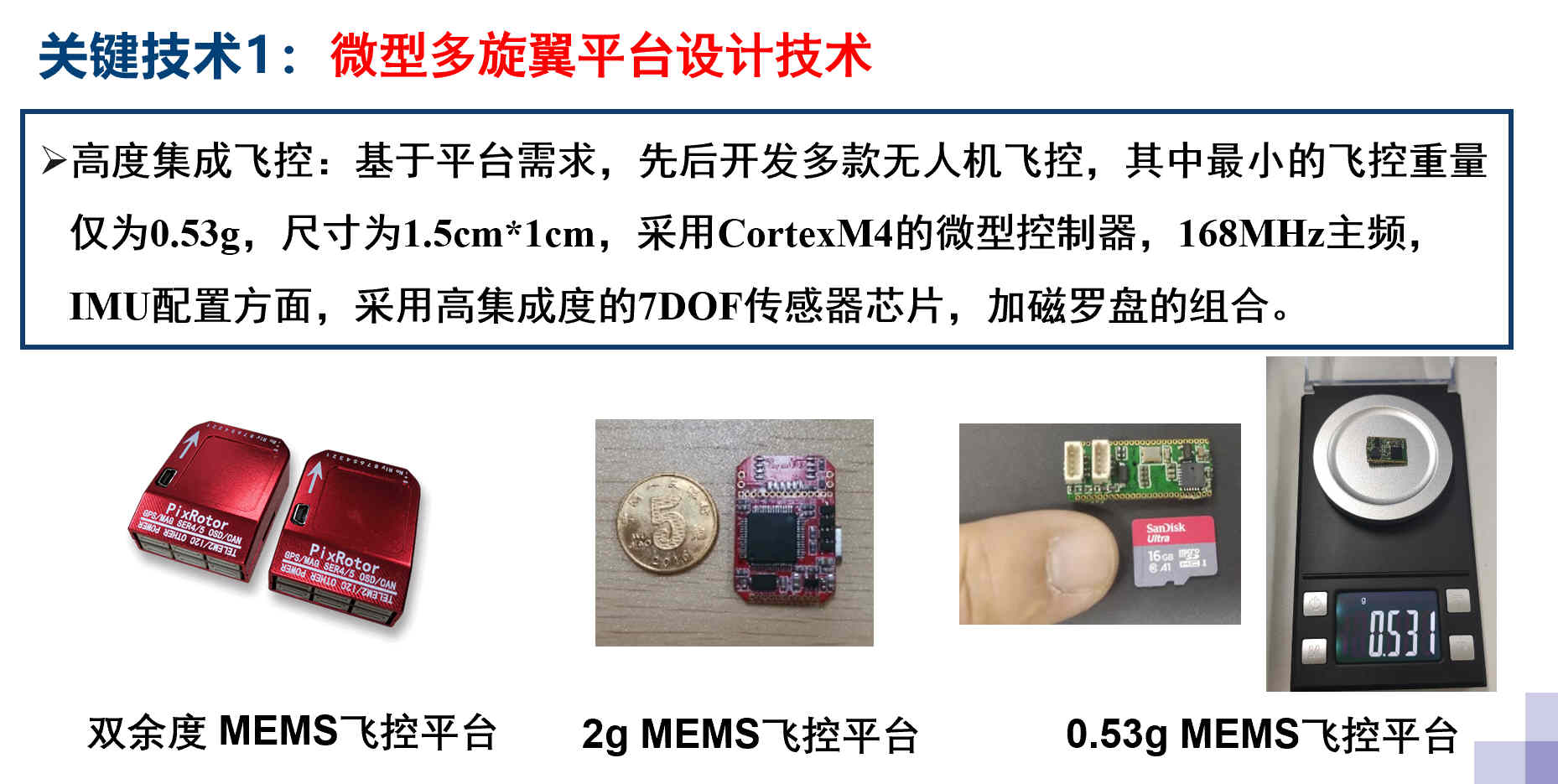
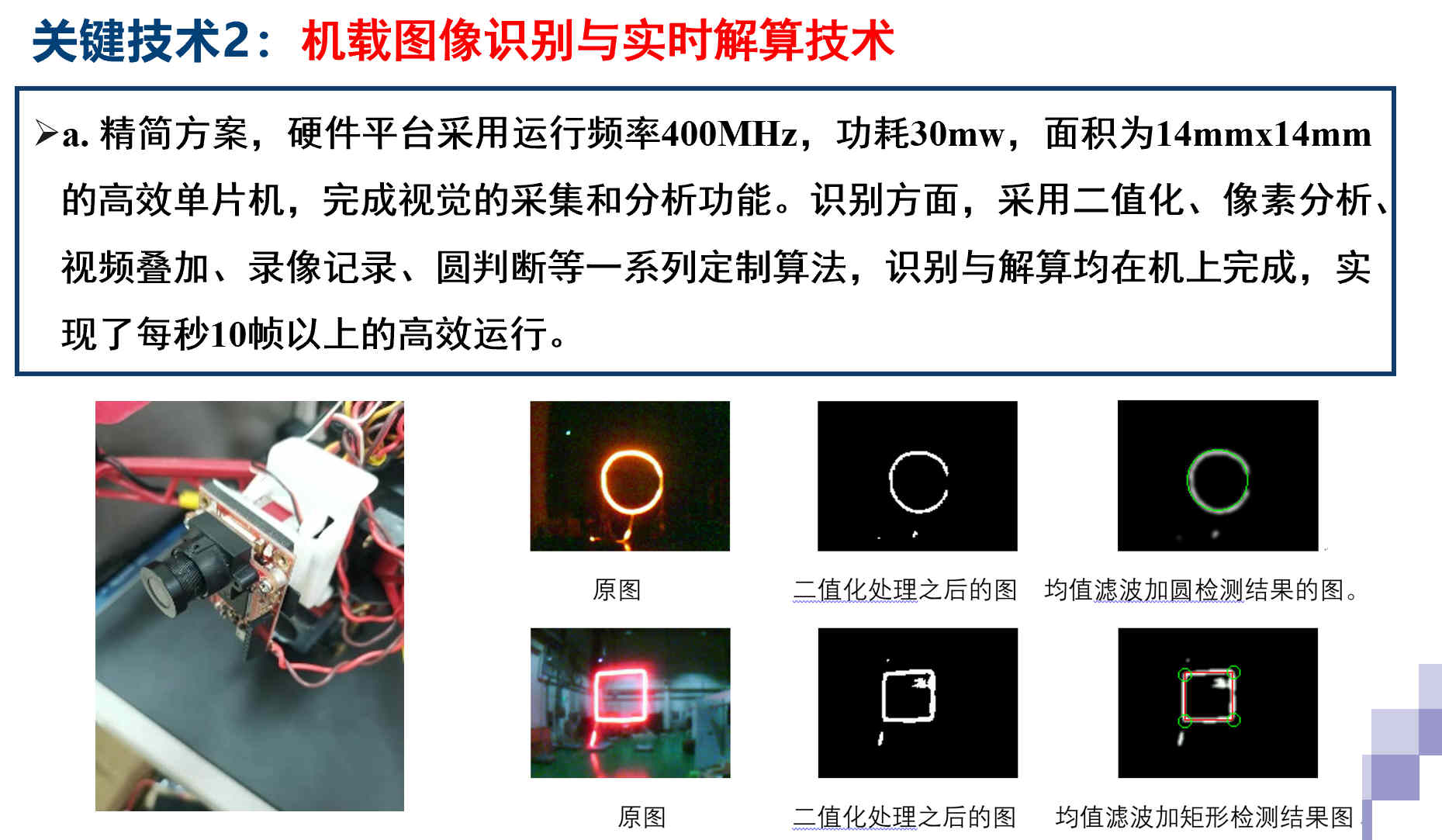
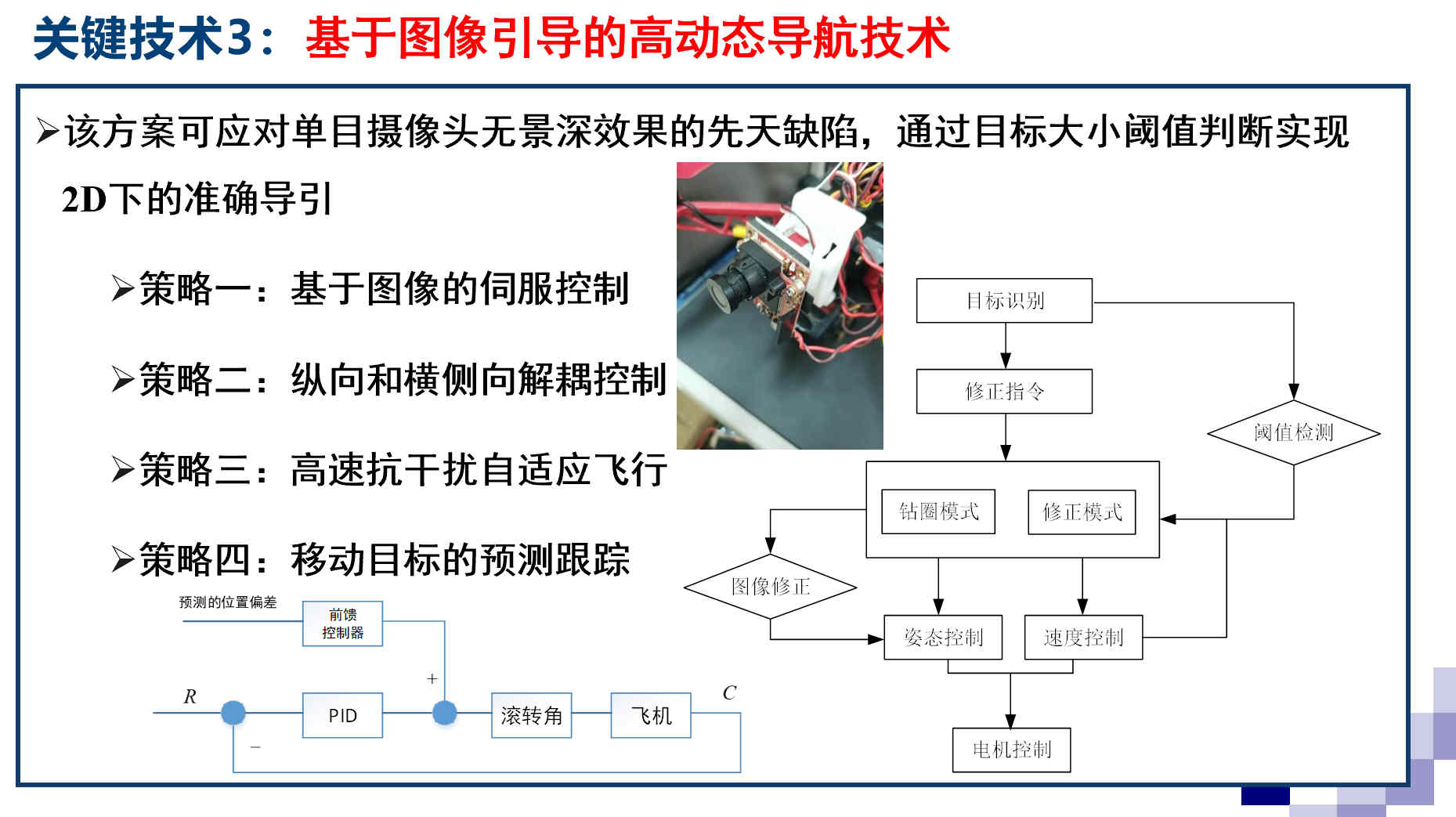
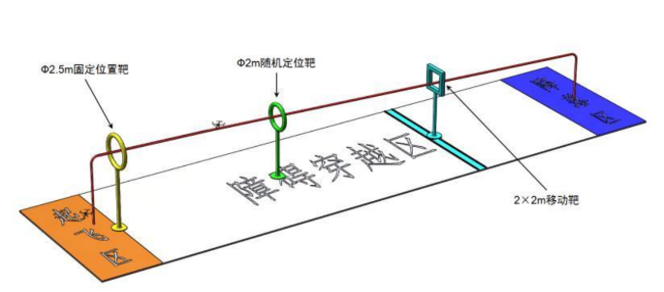
Note:在拒止环境下,微型无人机采用自主视觉导航,实现高速穿越移动靶标。技术难点与挑战:1.无GPS信息,自身定位困难;2.高动态目标的识别;3自主高速穿越飞行;4.微型化。
Type of Research Outcome:New Technology & New Process
Supported by:Enterprises and institutions shall entrust scientific and technological projects
Project level:Provincial and ministerial-level
First-Level Discipline:Control Science and Engineering
Subsidy Amount(ten thousand yuan):50.0
Associate Professor
Supervisor of Master's Candidates
E-Mail:
Date of Employment:2001-07-01
School/Department:Unmanned Aerial System Institute
Administrative Position:Prof.
Education Level:博士研究生
Business Address:room 506
Gender:Male
Contact Information:tel:13810026101 office:010-82317399 weixin: davidbuaa
Degree:博士
Status:Employed
Alma Mater:Beihang University(BUAA)
Discipline:Control Science and Engineering
Aeronautical and Astronautical Science and Technology
Honors and Titles:
“无人机蜂群自主协同决策与智能制导控制技术”获指挥与控制协会技术发明一等奖 2024-10-15
作为领队获得“无微不智2019”全国微型智能无人机挑战赛精准穿越项目一等奖 2019
“高空高速长航时无人机总体设计关键技术”获得北京航空航天大学科技进步二等奖 2009
The Last Update Time : ..