
仿生微机电系统
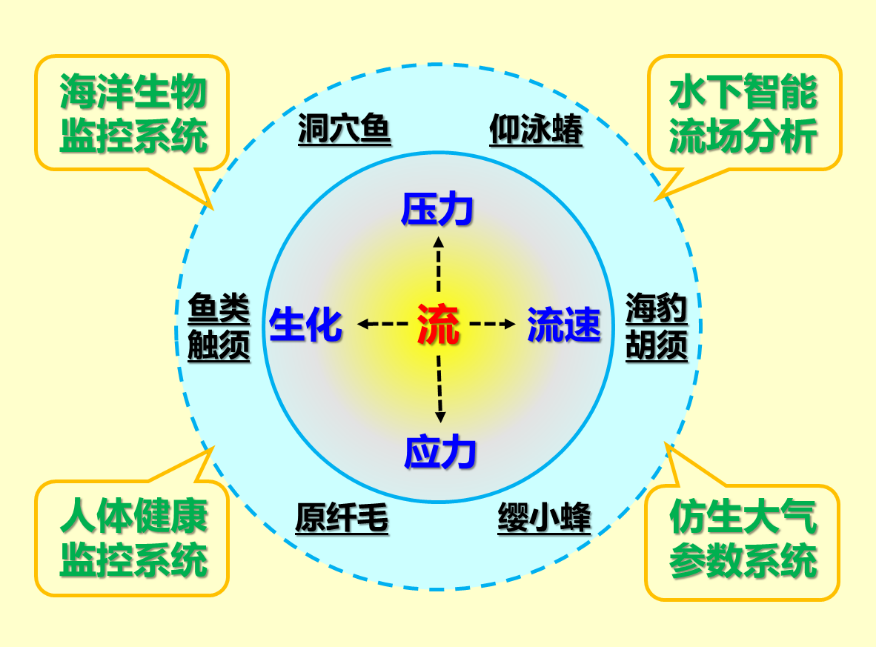
仿生微机电系统是仿生工程与微机电系统的前沿交叉热点研究领域。它是指模仿生物感知机理的智能传感材料、结构、器件和系统设计与制造方法,具有高灵敏度、融合感知、高冗余度、非线性、低能耗等特征。
本团队研究仿生微机电系统及其与集成电路和人工智能的融合,并发展其在柔性电子、机器人人机交互和智能感知蒙皮方面的系统应用。
1.生物感知的机械智能原理
探索盲鱼侧线、海豹胡须、缨小蜂梳子翼等在感知与运动中的特殊生物力学机理,建立微观结构与感知功能间的关系等。

管道侧线变径增敏(左)与梳子翼(右)增阻机制
2.仿生柔性微机电系统制造与集成
发展柔性基底与柔性智能材料的微纳加工新方法,研究基于仿生学原理的流场传感器及其柔性电子集成技术,实现各种高灵敏度的流场传感阵列与系统。举例如下:
(1)高灵敏人工侧线系统
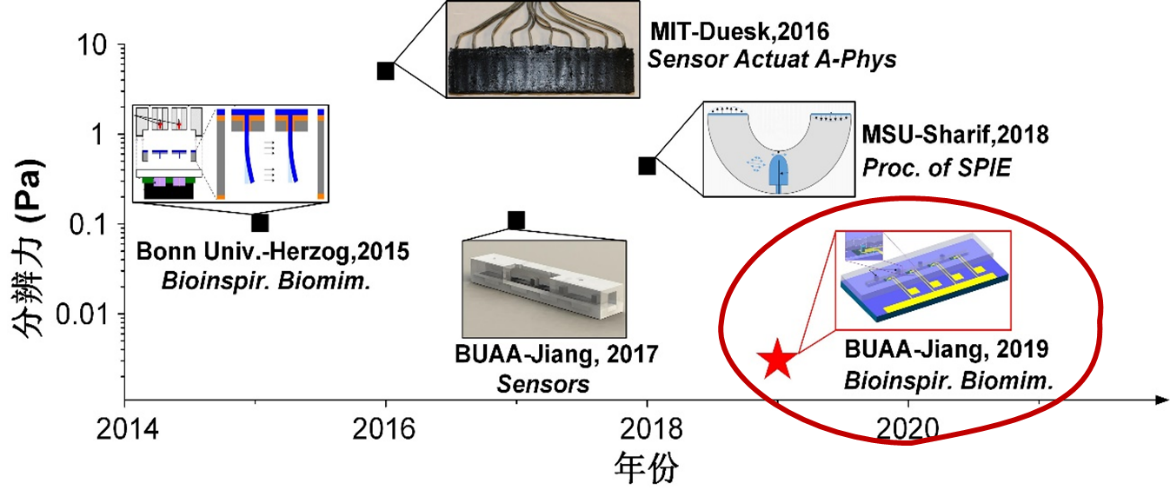
柔性人工侧线系统近年来的发展
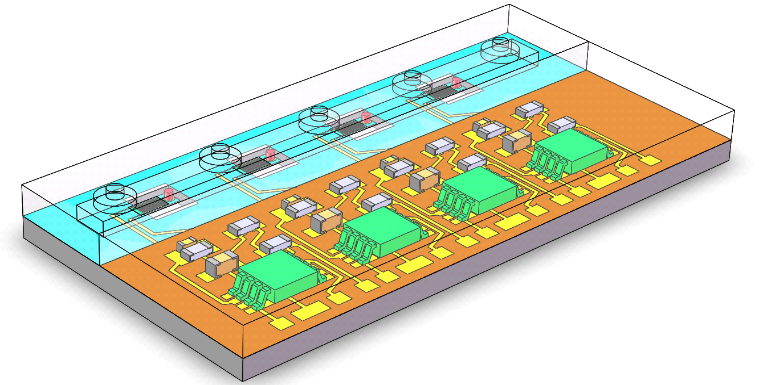
管道人工侧线系统与前置放大电路的集成
(2)仿生流场传感器及阵列化系统
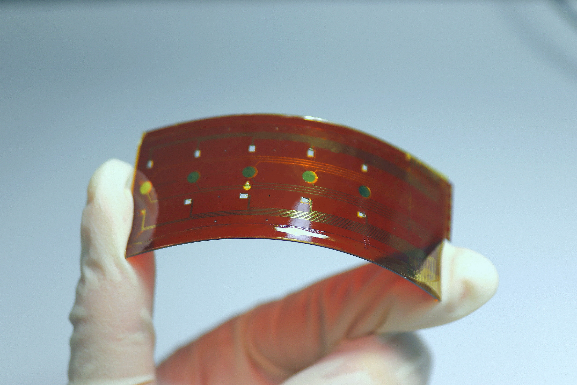
压力流速复合的柔性传感阵列

压力传感器的输出
(3)智能材料的电场诱导加工工艺

电击穿改性压阻技术 电纺丝压电纤维压电增强
3.机器人交互感知与智能蒙皮
探索柔性微机电系统与航行器和机器人的柔性共形与多参数融合算法,实现姿态感知、化学分析、远隔交互等多种功能。
(1)飞行器智能感知蒙皮应用验证
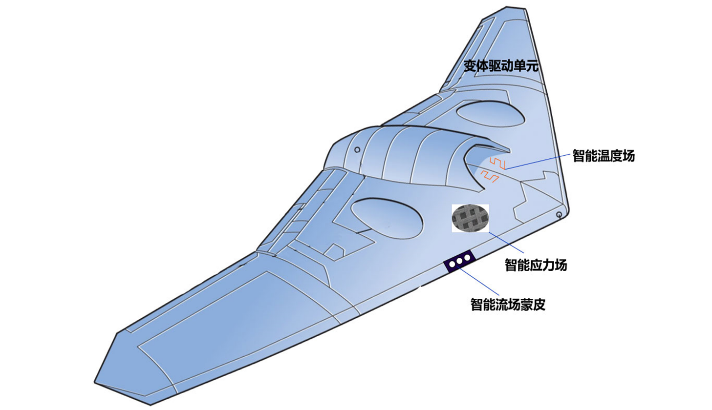
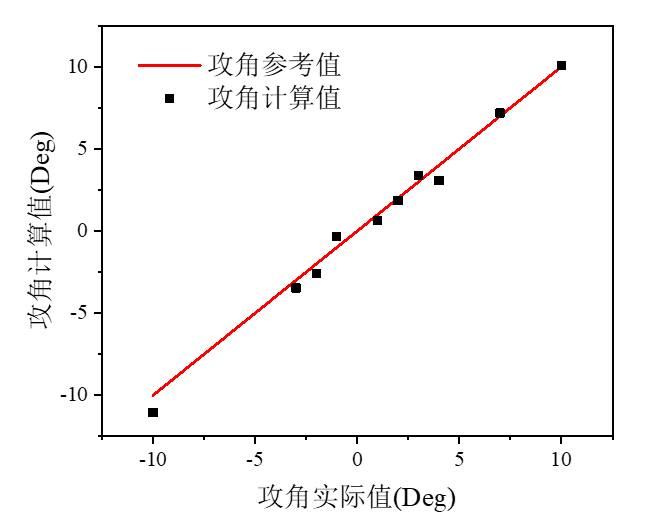
飞行器智能感知蒙皮及基于智能流场分析的攻角解算
(2)水下航行器智能流场分析
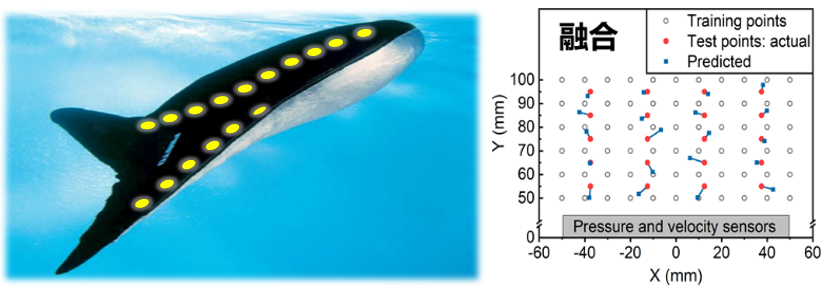
水下机器鱼的智能流场分析蒙皮与目标定位
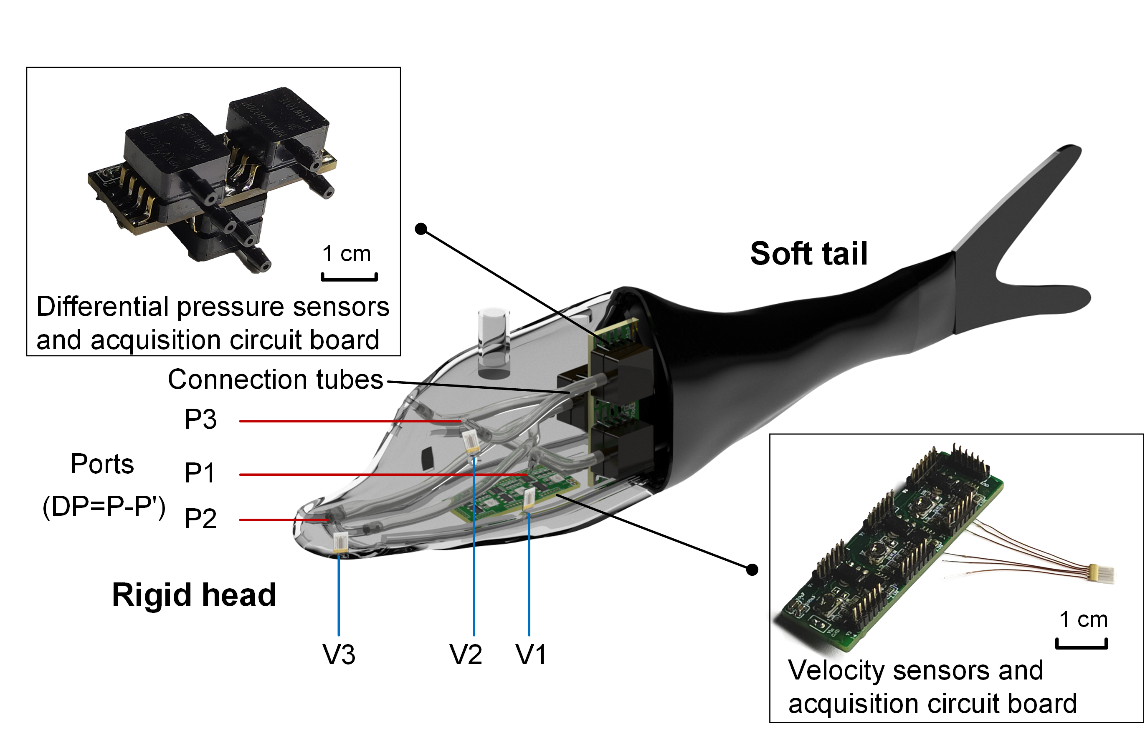
侧线集成的水下机器鱼
(3)机器人交互传感应技术

机械人交互与环境感知

微创夹钳触滑觉感知
